Certain manual tasks steal a huge amount of time from operators. They pull people away from more important work and reduce the quality of people’s jobs.
One such job is airplane washing. This vital task in aerospace manufacturing does not add direct value to the process, but it is important because it can prolong the life of the plane by reducing corrosion.
The task needs to be done but it would be much better if human workers did not have to do it!
Wilder Systems, an automation supplier based in Austin, Texas, USA, has developed a highly effective system for automating the task of airplane manufacturing. They did this by using RoboDK for programming. Their system provides aerospace with a way to reduce the time to perform this task by a whopping 95%!
The Problem with Manually Washing Aircraft
Washing is a critical task in airplane manufacturing as it helps to reduce corrosion, improving the life of the plane and its safety.
The conventional method of airplane washing involves the use of sponges, brooms, rags, and ladders. A team of 4 mechanics would usually take 4 hours to wash a plane manually, taking a total of 16 person-hours.
The entire task often takes up the whole day, making both the people and the plane unavailable for that time. During that time, they are unable to perform higher-value work.
Plane washing is also a dangerous and labor-intensive process. Working at height while standing on wet, slippery surfaces can lead to injury.

Introducing Wilder Systems
Wilder Systems specializes in cost-effective robotic solutions for aircraft manufacturers.
They describe their mission as being “to expand the range of feasible robotic applications by introducing robots into aerospace manufacturing and maintenance.”
The team uses a variety of robotic technologies to do this, including mobile robots, gantry robots, and collaborative robotics.
Enter the “Drive-Thru” Robotic Washing System
The team at Wilder Systems realized that the conventional approach to aircraft washing was inefficient. They knew that they could use robots to wash airplanes more efficiently and with less risk to humans.
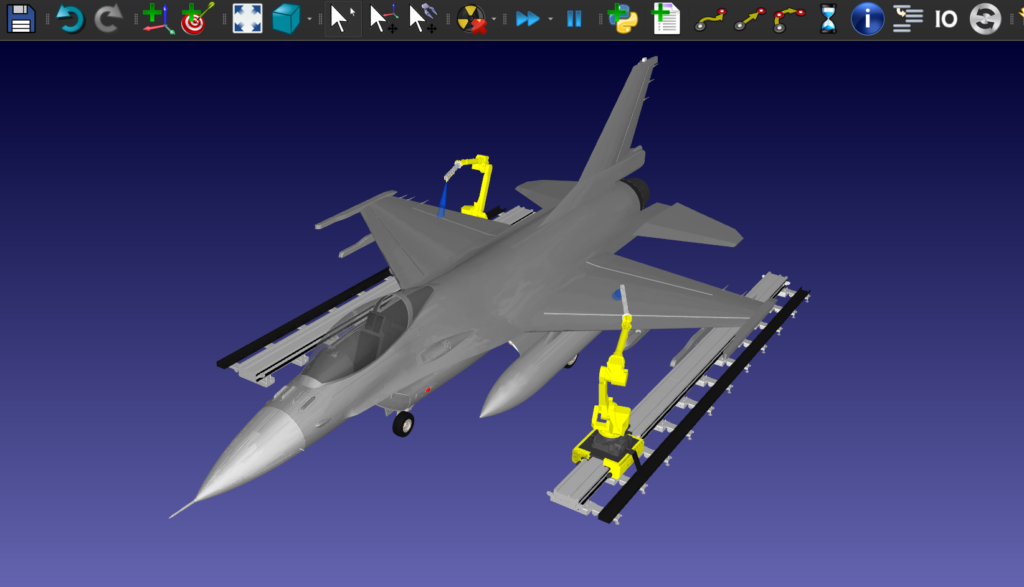
The goal of the project was to reduce the amount of labor and increase the safety of washing an F-16 aircraft. To do this, they designed the first robotic “drive-thru” washing system for aircraft, utilizing several robotic components.
The system provides a safer, faster solution to washing which eliminates downtime.
Compared to the 16 person-hours of the manual washing process, this system utilizes robots instead of people and the entire washing cycle is completed in just 52 minutes. If a person needed to oversee the robot, this would be a time saving of 95%. However, as the robot can operate alone, the saving is closer to a 100% saving in person-hours.
The Team’s Robotic Setup
The robotic system uses a combination of various off-the-shelf hardware and software components that the team at Wilder Systems integrate into a self-contained washing cell:

The Robotic Hardware
The hardware of the application is based around core components of:
- FANUC 6-axis industrial robots — Robotic manipulators perform the washing functionality of the task, moving the cleaning head over the airplane along programmed paths.
- PLC communication — As with many robotic applications, a Programmable Logic Controller provides the coordination between the different hardware components of the system.
- Hydraulic pump systems and auxiliary equipment — The “business end” of the application is the washing system. This uses a hydraulic pump system to propel water through the robot’s cleaning end-effector onto the dirty airplane. The robots communicate through IO to switch between the foaming and rinsing sprayer.
The Software Setup
The basic software components of the system are:
- RoboDK — Robot programming is performed by RoboDK, which makes offline programming quick and easy for both new and experienced robot programmers. The 3D model was imported from Autodesk Fusion 360, which integrates directly with RoboDK through a plugin.
- PLC programming — The team chose to use PLC programming to combine the hardware components. Various RoboDK users have successfully incorporated PLC and offline programming.
Alejandro Rengel, the main programmer of the project, explains what RoboDK allowed him to achieve in this project:
“RoboDK was the essential tool that allowed us to develop the world’s first-ever robotic plane wash. Using CAD-To-Path strategies, we were able to generate robot paths that were adaptive and error-proof.
RoboDK helped me transform from an entry-level programmer into an advanced programmer through their easy-to-use GUI, abundance of training resources, and phenomenal customer service.”
Which RoboDK Features Were Used
Rengel and the team used several of RoboDK’s features to create this unique application. The two robots were programmed to follow paths generated from CAD data while maintaining synchronization between each other.
Jérémy Brouillard, RoboDK’s Lead Product Manager, explains:
“Many RoboDK features were used in this complex project. Wilder Systems used the “teach target on surface” feature to program the first half of the plane. They defined the right washing angles and simply clicked on the plate surface to define the robot trajectories. To finish it up, they saved half the work by using RoboDK’s Python API to mirror the programs for the second half of the plane.”

RoboDK features that they used include:
- Simultaneous simulation of two robots.
- External axis to extend the robot’s range.
- “Teach on surface” to define the trajectory by simply clicking on the plane’s surface.
- RoboDK’s Python API to generate a mirror of the paths for the opposite side of the plane.
- FANUC post-processor to generate code to run on the robot controller.
What’s Next?
For Wilder Systems, washing is just the start.
The team plans to use this same robotic platform for other sophisticated and time-consuming aircraft maintenance tasks. This includes depainting and repainting, panel drilling, and non-destructive inspection. They will use the robotic washing application as a training opportunity for these future enhancements.
They also plan to further improve the agility of the system by mounting it into a mobile and autonomous platform. This allows them to perform operations throughout the flight line.
What manual tasks currently steal time from your operators? Tell us in the comments below or join the discussion on LinkedIn, Twitter, Facebook, Instagram, or in the RoboDK Forum.