RoboDK tips
3D Mouse Navigation
Reference Frames
Keyboard Shortcuts
Menu icons
Robot controls and Simulation
Create robot tool (TCP)
Export a simulation in 3D HTML or PDF
Create or edit a robot Post Processor
The RoboDK API documentation is available here. Some examples that use the Python API are available here.

3D Mouse Navigation
Select |
Pan |
Rotate |
Zoom |
 |
 |
 |
 |
| Left click Hold Ctrl to select more than one object |
Hold mid button or Hold Ctrl+Alt and select |
Hold right click or Hold Ctrl+Shift and select |
Move mouse wheel or Hold Shift and select |
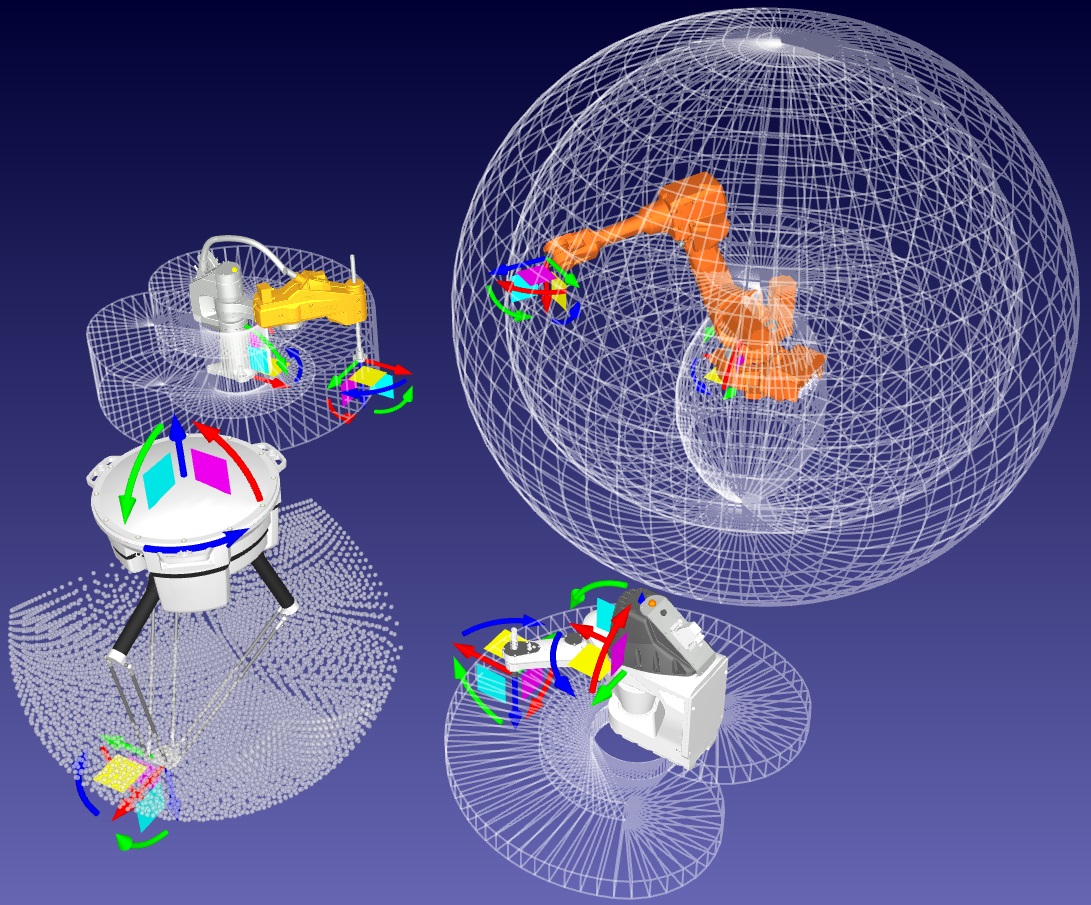
Reference Frames
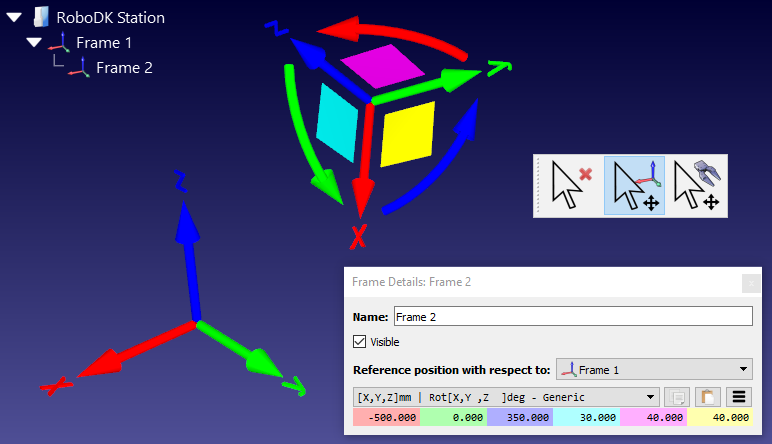
Reference frames allow placing objects with respect to each other. Drag & drop any reference frame or object in the Station Tree to create nested reference frames.
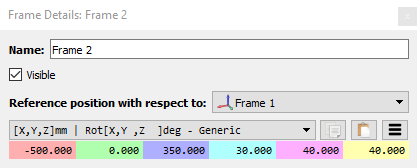
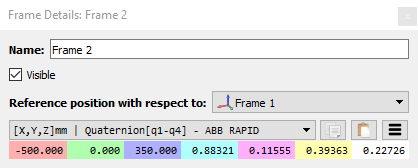
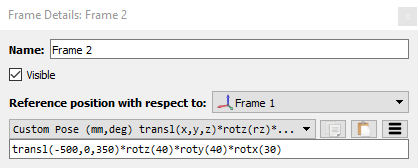
Hold the Alt key to move Reference Frames by selecting them on the 3D view. It is also possible to manually enter the translation and rotation values specific to any robot, including quaternion values and different types of Euler rotations.
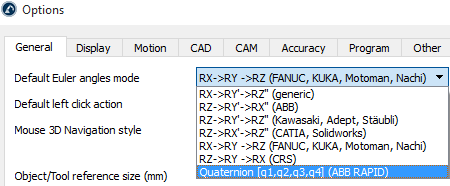
Select the preferred Euler orientation in the menu: Tools-Options-General-Default Euler Angles mode.
Select the buttons on the right to copy/paste the values from/to an array of values or as a 4x4 pose.
Default Euler angles
Quaternion values
Custom translation&orientation
Keyboard Shortcuts
| Alt |  |
Move reference frames, robots or other objects |
| Alt+Shift |  |
Move robot TCP (tools) |
| Ctrl+0 |  |
Fit the 3D view to the selected object(s) |
| F1 |  |
Shows the RoboDK documentation |
| F2 | Rename item | |
| F6 | Generate program(s) | |
| F7 | Show/hide selected object(s) | |
| + | Make frames bigger | |
| - | Make frames smaller | |
| / | Show/hide text | |
| * | Show/hide robot workspace | |
| Ctrl + 1 | Load last file or RoboDK Station |
Menu icons
 |
Load File from the computer. Formats supported: |
 |
Open Online Library |
 |
Save the station |
 |
Add a reference frame |
 |
Add a robot target |
|
Move Reference Frame |
|
Move Robot TCP (tool) |
 |
Activate collision checking. Items in a collision state will be displayed in red. |
 |
Fast Simulation |
 |
Add a Python Script (macros) |
 |
Add a new robot Program |
 |
Add a joint move |
 |
Add a linear move |
 |
Export a simulation as a 3D HTML or 3D PDF document |
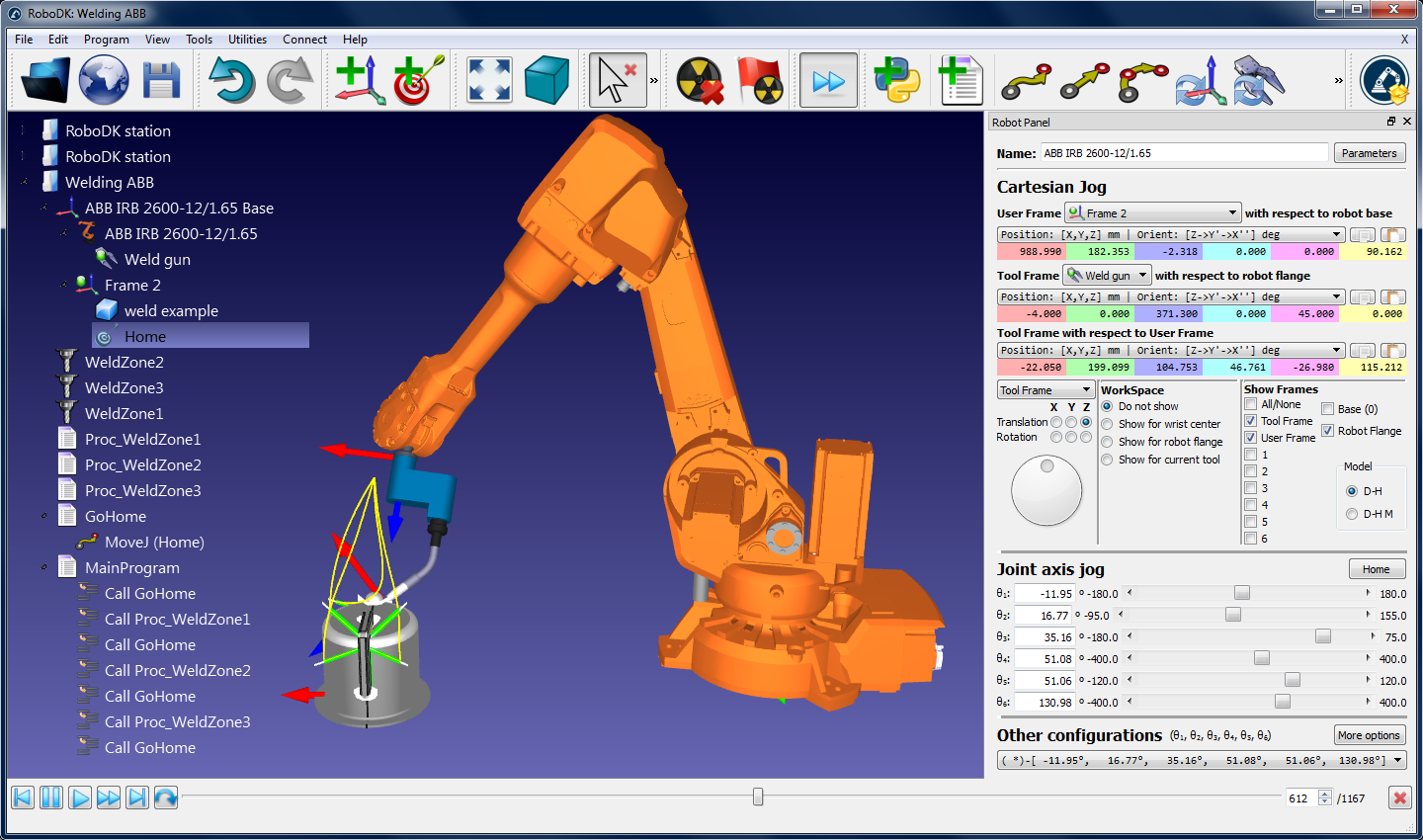
Robot controls and Simulation
Double click a robot to open the robot panel and jog the robot axis by axis or in the Cartesian space. The robot tool (TCP) and Reference frames can be modified in this window.
Double click a program to view the simulation.
Learn more about simulation and offline programming in the documentation
Create a robot tool (TCP)
Robot tools can be easily created by importing a 3D object and drag & dropping it to the robot. The object is then automatically converted into a tool. Import 3D objects to model the cell. Accepted 3D formats include STL, IGES and STEP files.
Learn more about creating robot tools in the documentation

Export a simulation in 3D format
Once a simulation is ready, export it as a 3D HTML simulation or as a 3D PDF. This feature allows to easily sharing layout and simulation concepts.
Example of a 3D HTML simulation document
Example of a 3D PDF simulation document (3D PDF simulations must be opened with Acrobat Reader, not a browser)

Tip: HTML simulations are larger than PDF simulations, compressing them will considerably reduce their size. The HTML simulation does not have any dependencies and can be shared as one single file.
- 0:02 Select File-Export Simulation to export the simulation in your desired format
- 0:11 The Start button will start recording the simulation
- 0:28 The 3D HTML simulation allows navigating in 3D and control the simulation time
- 0:55 The 3D PDF simulation also allows navigating in 3D and control the simulation time
Create or modify a robot Post Processor
The robot Post Processor defines how the robot programs should be generated. The conversion of the simulator movements to specific robot instructions is done by a Post Processor. Post Processors provide complete flexibility to generate the robot programs for specific requirements.
RoboDK provides Post Processors for most robot brands. Post Processors can be easily created or modified. One Post Processor in RoboDK is simply a Python file that defines how the code should be generated. Each robot brand uses a default post processor that can be modified to customize program generation and better adjust to specific applications.

Tip: Double click a post processor to see a preview of a sample robot program.
- 0:17 Once a program is ready, select F6 to generate the robot program
- 0:35 Create or Modify a post processor by selecting Program-Add/Edit post processor
- 0:56 Editing Joint and Linear movement commands to obtain the desired results
- 1:16 Right click a program and select Select post processor to select a post processor