Consejos RoboDK
Navegación 3D con Mouse
Marcos de Referencia
Atajos del Teclado
Íconos del Menú
Controladores de Robot y Simulación
Crear herramienta de Robot (TCP)
Exportar simulación en HTML 3D o PDF
Crear o editar un Post-Procesador para Robot
La documentaciòn API de RoboDK está disponible aquí. Algunos ejemplos que usan las API Python están disponibles aquí.

Navegación 3D con Mouse
Seleccionar |
Panear |
Rotar |
Hacer Zoom |
 |
 |
 |
 |
| Click izquierdo Mantenga Ctrl para seleccionar más de un objeto |
Mantener botón medio o Mantenga Ctrl+Alt y seleccione |
Mantener clic derecho o Mantenga Ctrl+Shift y seleccione |
Mover rueda del mouse o Mantenga Shift y seleccione |
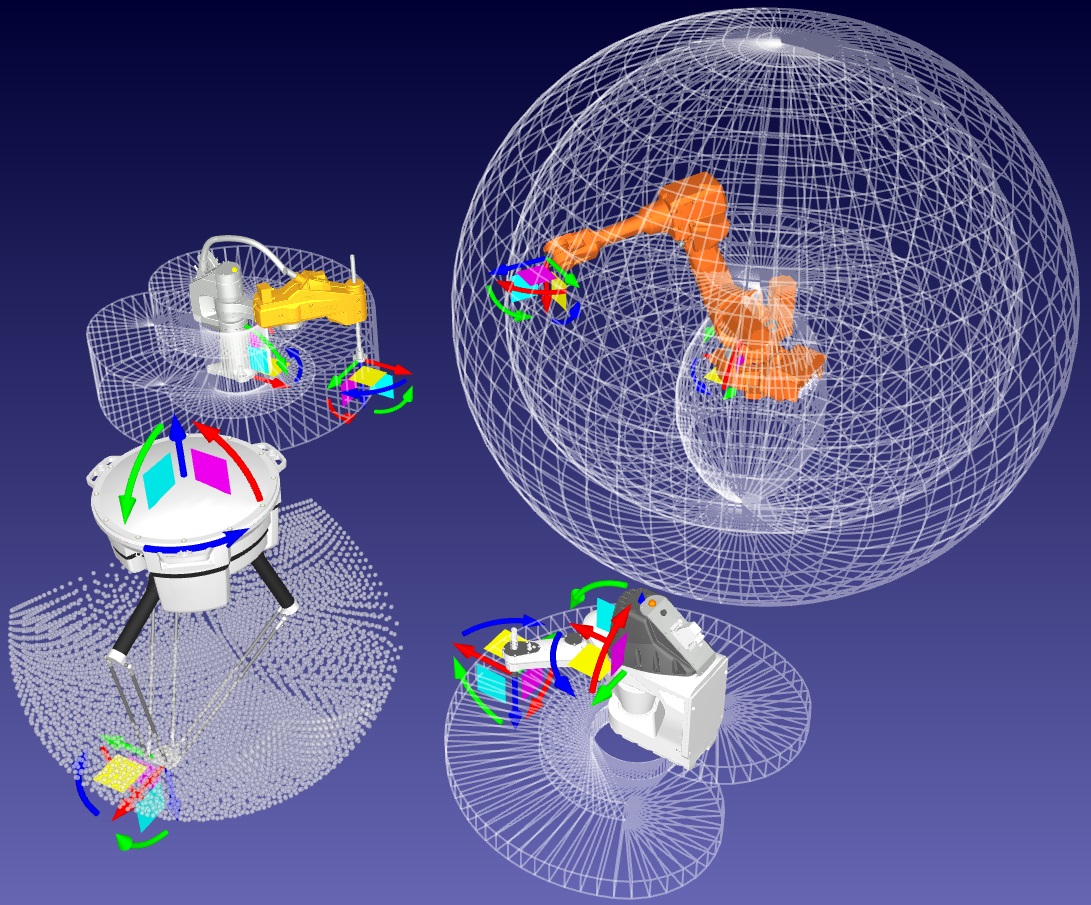
Sistema de coordenadas
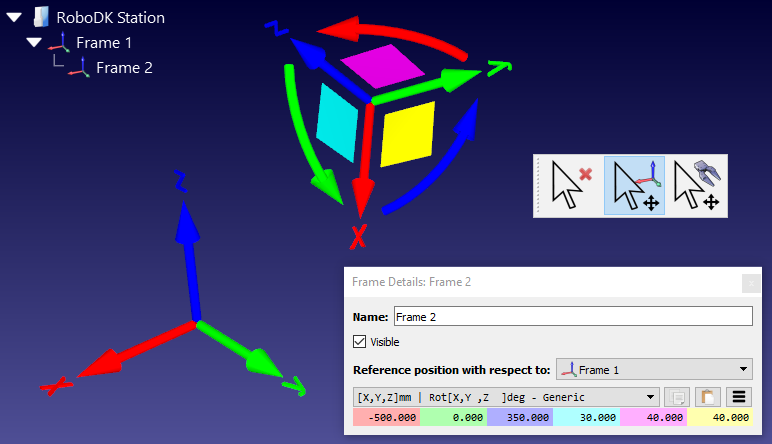
Los sistemas de coordenadas permiten colocar unos objetos con respecto a los otros. Arrastre y suelte cualquier sistema de referencia u objeto en el Árbol de Estación para crear sistemas de referencia anidados.
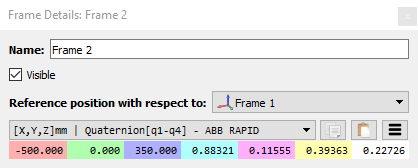
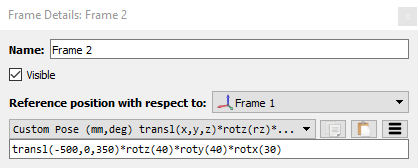
Mantenga presionada la tecla Alt para mover los sistemas de coordenadas seleccionándolos en la vista 3D. También es posible introducir manualmente los valores de traslación y rotación específicos de cualquier robot, incluidos los valores de cuaternión y diferentes tipos de rotaciones de Euler.
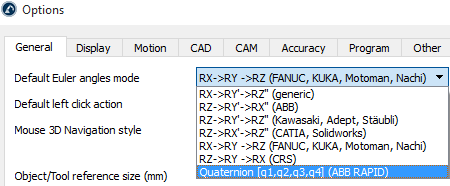
Seleccione la orientación de Euler preferida en el menú: Herramientas-Opciones-General-Modo de ángulos de Euler predeterminado.
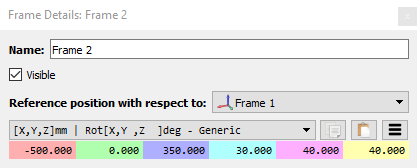
Seleccione los botones de la derecha para copiar/pegar los valores desde/hacia una matriz de valores o como un Pose de 4x4.
Ángulos Euler predeterminados
Valores del cuaternio
Traslación personalizada&orientación
Atajos del teclado
| Alt | 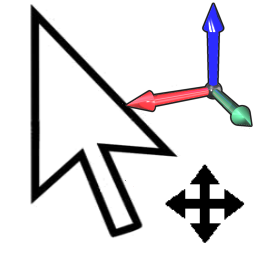 |
Mover sistemas de referencia, robots u otros objetos |
| Alt+Shift | 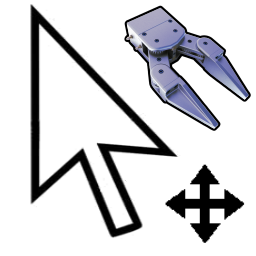 |
Mover el TCP (herramientas) |
| Ctrl+0 |  |
Ajustar la vista 3D a el/los objeto(s) seleccionado(s) |
| F1 |  |
Mostrar la documentación de RoboDK |
| F2 | Renombrar ítem | |
| F6 | Generar programa(s) | |
| F7 | Mostrar/ocultar objeto(s) seleccionado(s) | |
| + | Hacer sistemas más grandes | |
| - | Hacer sistemas más pequeños | |
| / | Mostrar/ocultar texto | |
| * | Mostrar/ocultar espacio de trabajo de robot | |
| Ctrl + 1 | Cargar el último archivo o la Estación RoboDK |
Íconos del Menú
 |
Cargar Archivo desde la computadora. Formatos soportados: |
 |
Abrir la Librería en Línea |
 |
Guardar la estación |
 |
Añadir un sistema de referencia |
 |
Agregar un objetivo robot |
|
Mover sistema de referencia |
|
Mover Robot TCP (tool) |
 |
Activar la verificación de colisión. Los elementos en estado de colisión se mostrarán en rojo. |
 |
Simulación Rápida |
 |
Añadir un Script Python (macros) |
 |
Añadir un nuevo programa de robot |
 |
Añadir un movimiento de articulación |
 |
Añadir movimiento lineal |
 |
Exportar una simulación como un documento HTML 3D o PDF 3D |
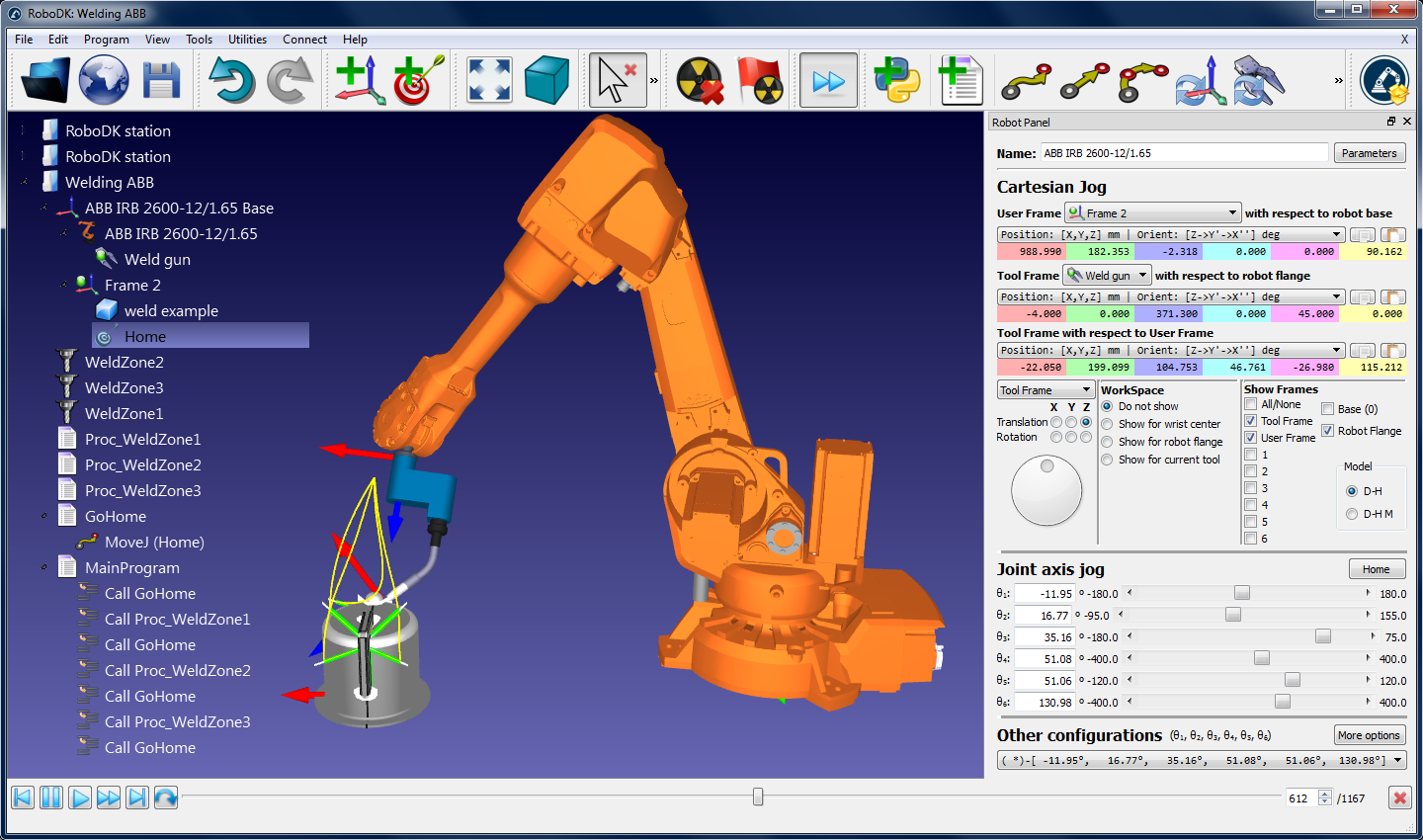
Controles de Robots y Simulación
Haga doble clic en un robot para abrir el panel del robot y mover el robot eje por eje o en el espacio cartesiano. La herramienta de robot (TCP) y los Sistemas de Referencia se pueden modificar en esta ventana.
Haga doble clic en un programa para ver la simulación.
Aprenda más sobre simulación y programación fuera de línea en la documentación
Crear una herramienta de robot (TCP)
Las herramientas de robot se pueden crear fácilmente importando un objeto 3D y arrastrándolo y soltándolo al robot. El objeto es convertido automáticamente en una herramienta. Importe objetos 3D para modelar la celda. Los formatos 3D aceptados incluyen archivos STL, IGES y STEP.
Aprenda más sobre cómo crear herramientas de robot en la documentación

Exportar una simulación en formato 3D
Una vez que la simulación esté lista, expórtela como una simulación HTML 3D o como un PDF 3D. Esta característica permite compartir fácilmente conceptos de diseño y simulación.
Ejemplo de un documento de simulación HTML 3D
Ejemplo de un documento de simulación 3D PDF (Las simulaciones de PDF 3D se deben abrir con Acrobat Reader, no con un navegador)

Consejo: Las simulaciones de HTML son más grandes que las simulaciones de PDF, al comprimirlas se reducirá considerablemente su tamaño. La simulación de HTML no tiene ninguna dependencia y se puede compartir como un único archivo.
- 0:02 Seleccione Archivo-Exportar Simulación para exportar la simulación en su formato deseado
- 0:11 El botón de Inicio comenzará a grabar la simulación
- 0:28 La simulación 3D HTML permite navegar en 3D y controlar el tiempo de simulación
- 0:55 La simulación PDF 3D también permite navegar en 3D y controlar el tiempo de simulación
Aprenda más sobre la exportación de simulaciones en la documentación
Crear o modificar un Post-Procesador de robot
Un Post-Procesador de robot define cómo se deben generar los programas de robot. La conversión de los movimientos del simulador a instrucciones específicas del robot la realiza un Post-Procesador. Los Post-Procesadores proporcionan una flexibilidad completa para generar los programas de robot para requisitos específicos.
RoboDK proporciona Post-Procesadores para la mayoría de las marcas de robots. Los Post-Procesadores se pueden crear o modificar fácilmente. Un Post-Procesador en RoboDK es simplemente un archivo Python que define cómo se debe generar el código. Cada marca de robot utiliza un Post-Procesador predeterminado que puede modificarse para personalizar la generación de programas y ajustarse mejor a aplicaciones específicas.

Consejo: Haga doble clic en un Post-Procesador para ver una vista previa de un programa de robot de muestra.
- 0:17 Una vez que un programa esté listo, seleccione F6 para generar el programa de robot
- 0:35 Cree o modifique un Post-Procesador seleccionando Programa-Añadir/Modificar Post-Procesador
- 0:56 Edite comandos de movimiento lineal y conjunto para obtener los resultados deseados
- 1:16 Haga clic con el botón derecho en un programa y seleccione Seleccionar Post-Procesador para seleccionar un Post-Procesador
Obtenga más información sobre los Post-Procesadores en la documentación